Team: Yuhan Hu, Jasmine Lu, Nathan Scinto-Madonich, Miguel Alfonso Pineros, Pedro Lopes, Guy Hoffman.
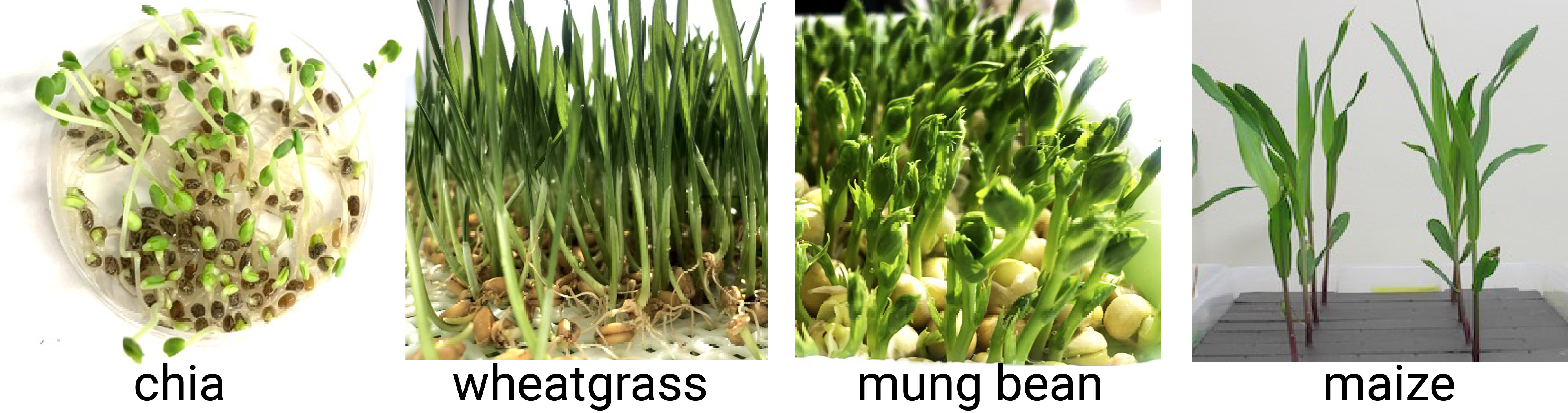
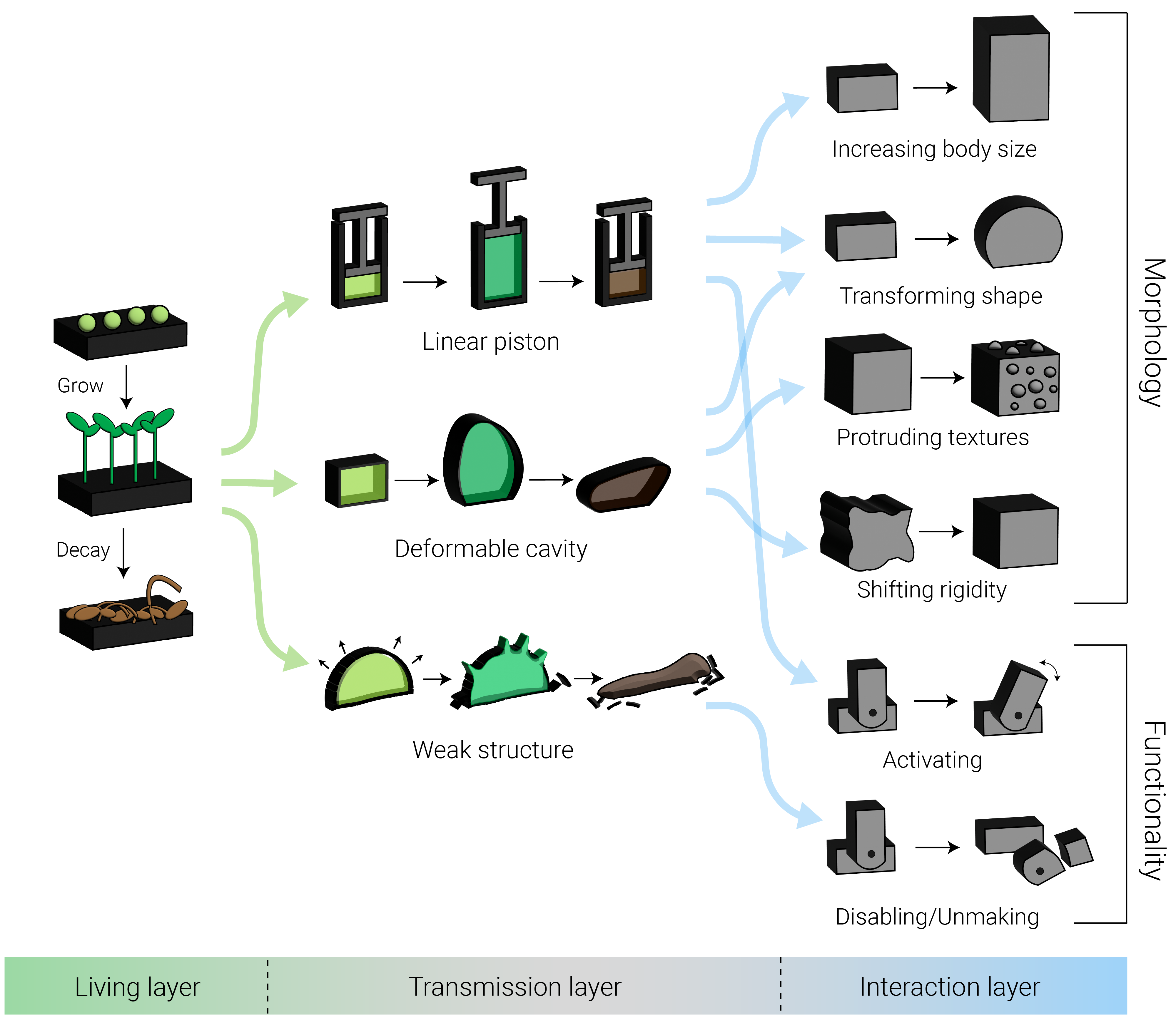
In this work, we explored challenging the never-aging permanence of robots’ bodies by designing robots that age and decay. To do this, instead of using electromechanical systems, we designed robotic mechanisms that are actuated by plant growth. We introduce both mechanisms to create morphological transformations (size, shape, texture, rigidity) as well as functional transformations (activating, disabling). We share several prototypes of these mechanisms and discuss how robotic systems that anticipate growth, aging, and decaying introduce new, complex human robot interactions.
This paper was presented as part of the DIS2024 proceedings and can be found here.

Paper Abstract.
Designing plant-driven actuators presents an opportunity to create new types of devices that grow, age, and decay, such as robots that embody these qualities in their physical structure. Plant-robot hybrids that grow and decay incorporate unpredictable and gradual transformations inherent across living organisms and suggest an alternative to the design principles of immediacy, responsiveness, control, accuracy, and durability commonly found in robotic design. To explore this, we present a design space of primitives for plant-driven robotic actuators. Proof-of-concept prototypes illustrate how concepts like slow change, slow movement, decay, and destruction can be incorporated into robotic forms. We describe the design considerations required for building plant-driven actuators for robots, including experimental findings regarding the mechanical properties of plant forces. Finally, we speculate on the potential benefits of plant-robot hybrids to interactive domains such as robotics.